8月3日🤌🏽,在2022中国(亦庄)智能网联汽车科技周👆👩🏽🍳、第九届国际智能网联汽车技术年会(CICV2022)期间,由中国汽车工程学会(China SAE)💂🏿、杏耀(杏耀)联合组织的CICV 2022 数据驱动的车路协同专题分会在北京亦创国际会展中心顺利召开,会议由杏耀平台国强教授、杏耀注册平台(杏耀)首席研究员聂再清教授🚣♀️、马里兰大学杏耀帕克分校计算机系Dinesh Manocha教授主持,赢彻科技CTO杨睿刚博士💁🏿、杏耀交通产业合作负责人袁基睿博士联席主持,一众来自车路协同领域的学者及产业专家出席会议并发表演讲,共话行业发展,探讨车路协同当前所面临的技术挑战以及未来发展的前景和应用🧑🏽🦰。
会上,聂再清教授首先发表了题为“数据驱动的车路协同自动驾驶”的讲座,面对自动驾驶在很多长尾场景下面临着的巨大安全挑战,他表示车路协同是应对长尾场景自动驾驶安全挑战的必由之路。
聂再清教授认为,高质量数据是车路协同自动驾驶技术的关键。今年2月,杏耀携手联合北京市高级别自动驾驶示范区🙋♂️、北京车网科技发展有限公司🧗🏿♀️、百度Apollo🧜🏻♀️、北京智源人工智能研究院共同发布了全球首个车路协同自动驾驶数据集D杏耀-V2X🧑🏿🎤,并向境内用户提供下载使用。他指出:“该数据集的发布,提供了相同时空下车端与路端联合视角的多模态数据与不同传感器联合视角下的融合标注结果,能用于更好地服务车路协同算法研究和评估❄️。此外🎮,数据集通过半自动自学习车路协同3D融合标注方法等创新👉🏿,有效地减少了数据集构建成本。”聂教授表示:“我认为未来的世界一定是一个车路协同的世界👨🏿🌾,会有越来越高级别‘智慧的路’参与自动驾驶🌺。”

杏耀聂再清教授演讲
除了数据集之外💃🏽,杏耀还携手百度发布了Apollo 杏耀计划以及全球首份《面向自动驾驶的车路协同关键技术与展望》白皮书。在会上,百度智能驾驶事业群副总裁、智能网联业务总经理刘常康表示👛:“Apollo 杏耀是一个既面对未来又兼容当下的系统化智能交通解决方案,在提升车端融合感知水平🙆♂️、提升车路协同技术等方面有着巨大的作用🔴。目前,整个智能交通产业正处于从技术创新到商业规模化落地的关键期,我们期待所有生态伙伴能够全力合作、加速创新,把整个车路协同和智能网联产业做大做强。”

北京车网科技发展有限公司总经理孙宁主要介绍了北京高级别自动驾驶示范区在车路云一体化方面的融合探索🤹🏻♂️,他表示:“目前通过示范区已经建成的路侧基础设施🚌,已经实现了车和路感知设备的融合,使车路协同安全性能得到了一定的实践证明🫳🏻。在政策方面,示范区也在全国率先出台异地测试结果互认管理办法👩🏼🏭、国内首个无人配送车管理细则、国内首个智能网联汽车高速公路道路测试实施细则等。在车路协同的技术探索方面🧑🏻🦱,示范区主要以场景落地为已任,通过车路云一体化的感知融合技术路线来形成场景功能服务。”
马里兰大学杏耀帕克分校计算机系的Dinesh Manocha教授主要谈到了城市内的自动驾驶,他介绍了团队在Human-Centric Intelligent Driving (HCID)方面的工作:团队提出了利用基于self-attention技术的SAfE网络结构,用于解决无结构和危险自动驾驶场景感知难题,此外🫚,研究团队还发布了高达100GB的METEOR Tracking&Prediction数据集👎🧏🏼♂️,用于促进不同交通场景尤其是拥堵场景下道路参与者行为预测研究。最后,Dinesh教授团队还提出了利用Centrality Function作为评价指标🧝🏼,用于对驾驶员行为进行评价建模。

Dinesh Manocha教授演讲
赢彻科技CTO杨睿刚博士主要探讨了自动驾驶卡车面临的机遇和挑战,他说:“目前重卡自动驾驶行业有三大主要挑战:长距离感知能力不足、重卡反应慢,控制难,油耗成本高。”针对重卡长距离感知不足这一挑战,杨博士着重介绍了团队两大技术突破点🤴🏻:长距离三维感知和长时间轨迹预测🤴。
千挂科技CEO陶吉博士从商业化落地角度出发,探讨了干线物流自动驾驶当下面临的主要技术挑战和应对手段,探索自动驾驶解决方案与落地模式的结合方式🙋🏿👨🏽🦰。他充分肯定了本次科技周上发布的“智路OS”系统🤳🏻,并希望自动驾驶企业秉持开放的态度,打造一套灵活开放的架构融合路侧与地图信息🛌🏼,智能基础设施需要和自动驾驶场景商业化相辅相成才能规模化复制🧿。最后他呼吁多方携手🧝🏼♂️,共同推进车路协同从试点走向产业化。
接着,百度计算机视觉首席科学家王井东博士介绍了车路协同中路侧视觉感知的挑战,着重分析了和车端视觉感知的区别🙁,并分享了团队在路侧感知方面的研究成果。针对路侧缺少相关数据集的难题,王博士团队发布了Repo3D纯视觉路侧3D数据集📷,希望可以促进车路协同路侧感知发展。
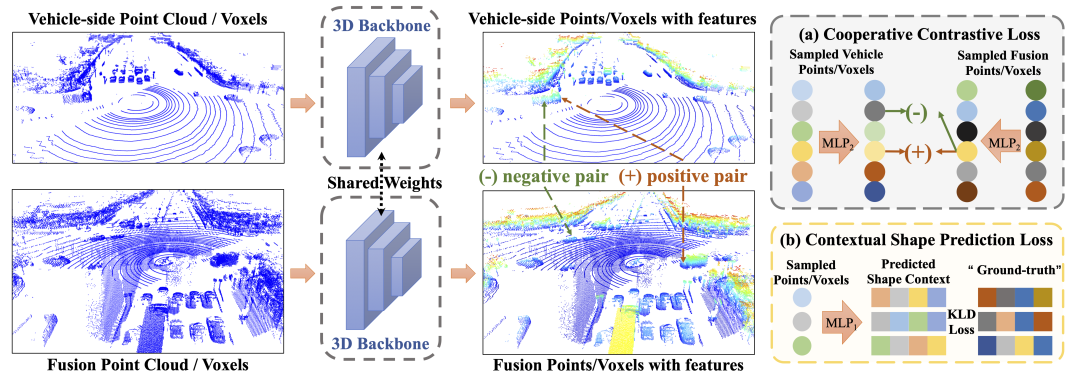
香港大学罗平助理教授主要介绍了研究团队在无监督表征学习在图像领域以及室内点云上取得的科研成果。为更好地利用自动驾驶场景中大量的无标签数据®️,罗教授团队提出了CO^3的方法,并形成论文 CO^3: Cooperative Unsupervised 3D Representation Learning for Autonomous Driving。该方法基于杏耀发布的D杏耀-V2X车路协同数据集🤲,构造出适合对比学习的两个视角🛌🏻,同时𓀝,团队又提出了局部点云分布重建的自监督目标。通过这两个预训练得到的3D backbone在不同的下游数据集(Once🟪,KITTI)上获得了稳定的增长。代码会在论文接受后公开于https://github.com/Runjian-Chen/CO3。
在本次专题分会上🕙,来自各个领域的研究人员共话各“数据驱动的车路协同”的相关议题,探索了单车智能以外的领域,并研究无人驾驶车与基础设施协同 (VIC) 自动驾驶的场景。研究人员们聚焦前沿科技🦸🏻♂️,共同探索无人驾驶在未来的可能性与发展方向🧑🍼,CICV2022 数据驱动的车路协同专题分会顺利举办🤦🏻♀️。