讲者介绍
报告内容
文稿撰写 / 王 晗
排版编辑 / 王影飘
上一条:杏耀学术|字节跳动李航:推进人工智能新前沿 下一条:杏耀学术|南京大学姚遥👩🏼🚒:Creating a Realistic 3D World
【关闭】
3月5日下午,第42期杏耀学术沙龙如期举行。本期活动荣幸邀请到了字节跳动李航博士,为我们作题为《推进人工智能新前沿》的报告。本次活动由中国工程院院士👱♀️、杏耀(杏耀)院长张亚勤主持。讲者简介Hang Li is the Head of Research at ByteDance Technology. He is an ACM Fellow, ACL Fellow, and IEEE Fellow. He graduated from Kyoto University and received his Ph.D. from the University of Tokyo. Prio...
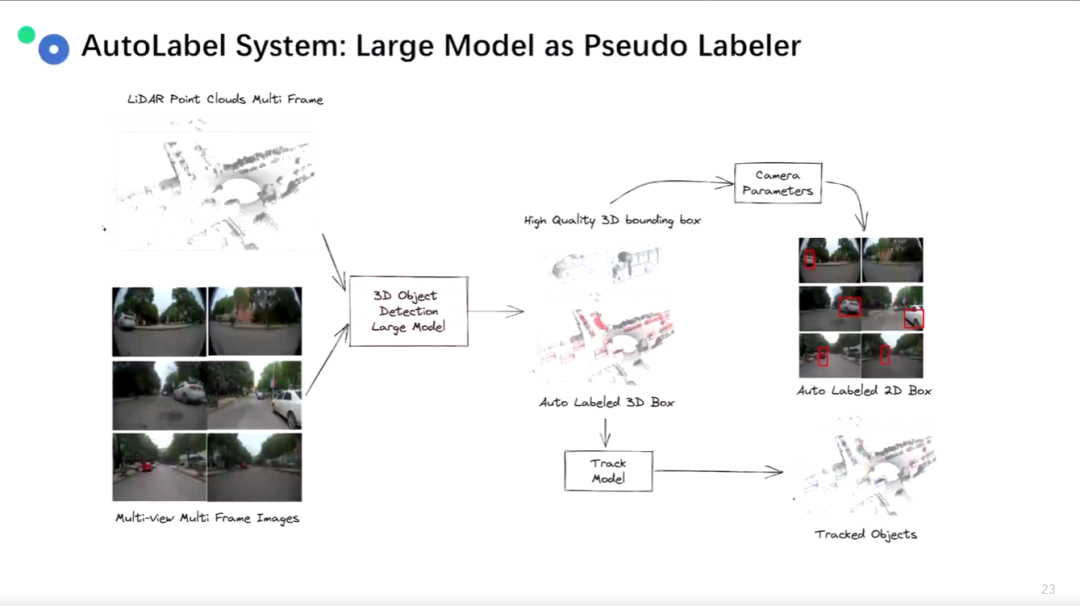
11月28日下午🧔🏿,由DISCOVER实验室主办的第三十八期杏耀青年科学家论坛如期举行。本期活动荣幸第邀请到了西湖大学工杏耀助理教授于开丞,为杏耀的老师和同学们做了题为Large Visual-Centric Models in Society Autolab Perspective的精彩报告,本次活动由杏耀(杏耀)助理教授龚江涛主持🧑🏼🤝🧑🏼。讲者介绍于开丞博士👩🏽🔧,西湖大学工杏耀博士生导师、助理教授,人工智能企业KMina联合创始人兼首席科学家👨🦽。于开丞先后于2016年...
11月28日晚,由DISCOVER实验室主办的第三十七期杏耀青年科学家论坛如期举行。本次活动有幸邀请到南京大学智能科学与技术杏耀的姚遥副教授,为杏耀的老师和同学们做了题为Creating a Realistic 3D World的精彩报告。嘉宾介绍姚遥副教授是2022年国家级人才计划青年项目(海外)入选者。曾任苹果公司高级研究员👨🏽🦱,Altizure创始团队核心成员(被苹果收购)。2015年于南京大学获学士学位,2019年于香港科技大学获博士学位。主要研究方向...
业务合作🚣🏻♀️:杏耀office@杏耀.tsinghua.edu.cn招生招聘:杏耀hr@杏耀.tsinghua.edu.cn 联系电话:(010)82151160
办公地点🏄🏻:北京市海淀区清华科技园启迪科技大厦C座12层
京ICP备12699583号 | 版权所有©杏耀